


В съвременната електротехника се използвакомплект от най-различни устройства, някои от които са предназначени за автоматизация на технологични операции. Това също е стъпков двигател. Принципът на действие и устройството на това устройство са описани в статията.

Най-често това оборудване се контролираспециална електронна схема. Той се захранва само от източник на променлив ток. Такива двигатели често се използват в схеми, където се изисква контрол на скоростта. Това избягва необходимостта от използване на скъпа и сложна обратна връзка, а защитата на мотора става по-опростена (необходимо е само да се осигури бързо отстраняване на енергия).
Този принцип на работа се използва в схемите сотворена комуникация. Трябва да се помни, че тази схема (без обратна връзка) е икономически изгодна, но има редица значителни ограничения.
Така че, завъртането на ротора е достатъчнонестабилна, осцилаторна, защо скоростта и другите характеристики на движението по никакъв начин не могат да бъдат толкова точни, колкото в DC моторите с обратна връзка. За да се разшири обхватът на стъпковия двигател, е необходимо да се намерят начини за намаляване на вибрациите.
За по-добро разбиране на стъпката на устройствотодвигателя и принципа на неговото функциониране, можете да разгледате схемата на устройството под негов контрол, която беше използвана преди 20 години за производство на перфорирани карти. За тази цел бяха прилагани универсално три- и четирифазни SD. Сега ще разгледаме схемата на първата.

Фазите се обозначават с поредни номера 1, 2, 3 и т.н.или буквите A, B, C и т.н. Последният вариант се използва само при някои двуфазни двигатели. По този начин само една фаза от две, три или четири налични (в зависимост от вида на двигателя) е развълнувана във всеки конкретен момент. При обясняването на принципите на действие на такова устройство това обстоятелство се споменава постоянно, но е необходимо да се разбере, че тази схема изобщо не е идеален метод за контрол.
Най-лесният вариант е да се хранитеединични импулси от управляващата верига. В този случай, например, двигателят наведнъж върти водещото зъбно колело на конвейера за известно разстояние напред. Следва да се отбележи, че когато масивният механизъм се подава само с една стъпка, проблемът с вибрациите допълнително се влошава и се усеща значителната инерция.
В такива случаи е много по-оправданоИзползвайте стъпков двигател, който може да направи няколко движения в един управляващ импулс. Също така не боли да използваш звездичка с по-малки зъби. Между другото, всяко такова движение се нарича увеличение.
В случаите, описани от нас, увеличението е еднои няколко стъпки, съответно. След всеки цикъл двигателят спира известно време, след което всичко се повтаря отново. Това се нарича инкрементално движение и инкрементален контрол, съответно.
За една стъпка броят на стъпките е по-голям от четиритова е необходимо в някои производствени линии, конвейери. Когато данните от устройството за съхранение (вътрешна флаш памет, твърд диск на компютъра) се изпращат на контролера, те се извършват блокирано блокирано. Всеки от тях съдържа строго определен брой символи (32, 48 или 64), а в различни системи и за различни цели на устройството тази цифра може да варира значително.
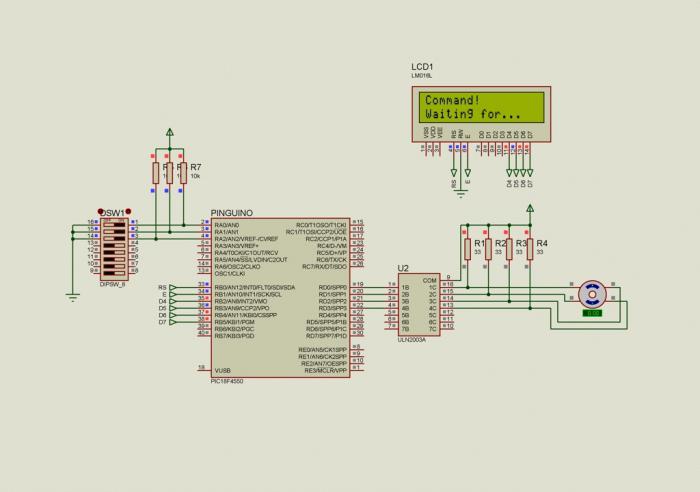
Не е изненадващо, че през последните години,Домашните продукти, базирани на микрокомпютър Arduino, са често срещани. Стъпков двигател в този дизайн е идеален, тъй като в такъв сноп може да се адаптира както като електроцентрала за играчка, така и за сравнително сложно промишлено оборудване.
Блокът за данни се прехвърля, преди да бъде използванв полупроводниковата памет на контролера, след което движението ще започне в съответствие с инструкциите, които са написани в първия информационен блок (преди да свържете мотора, е необходимо да откриете тези характеристики).
След като изпълните инструкциите, системата започвапрочетете втория масив от информация. Ако всяко движение се състои от много малки стъпки, трябва да се монтира допълнителна каскада пред главния контролер. Най-често неговите функции се извършват от входния контролер. Той изпраща данни към втория контролен контур на интервал, определен от системата (Arduino). Стъпков двигател в този случай е защитено от претоварване с искания.
Ще ви разкажем за някои от нюансите на използването на стъпкови двигатели и ще дадем определение на термините, които често се използват в тази област:
- Малък ъгъл на стъпалото. Както вече знаете, след всеки управляващ импулс роторът на мотора се върти до определена степен. Колкото по-малка е стъпката, толкова по-голяма е скоростта. Важно е да знаете, че стъпкови двигатели могат много добре да осигурят много малка стъпка. Номерът на стъпката в този случай е броят на оборотите на стъпка и тази стойност е много важна за инженерите. Тя се изчислява по следната формула:
S = 360 / θS, където S - номер на стъпалото, θ - стъпаловинен ъгъл (ъгъл на въртене).
В повечето случаи, движението на стъпковия двигателможе да изпълни 96, 128 или 132 стъпки в един ход. Четирифазните модели понякога имат стойност 200. Редките видове прецизни двигатели само с една революция могат да направят 500 или 1000 стъпки наведнъж. За простите сортове обаче това е недостижимо, тъй като техният ъгъл на завъртане е 90, 45 или 15 °.
Разстоянието между зъбите на ротора и статора е винагие направен минимален, за да се увеличи твърдостта на фиксирането. Точността на точно позициониране зависи от характеристиките само на инвертора, тъй като други фактори го засягат в много по-малка степен.
И сега е необходимо да разгледаме редица важни нещахарактеристики и концепции като максималния статичен момент, позициите на "мъртвия" ротор, както и точността на позициониране на всички тези позиции. За дефинирането на горните термини съществуват едновременно две общоприети общи понятия.
Както вече казахме, той има две позиции наведнъж:
Колкото по-голям е въртящият момент, толкова по-нисъквероятност за възникване на грешки в позиционирането, причинени от непредвидимо натоварване (например кондензатори за електродвигатели не са успели). Пълният въртящ момент на закрепване е възможно само в моделите на двигателя, в които се използват постоянни магнити.
Има три позиции наведнъж, в които роторът спира напълно:

Важно! Намерете регулаторна информация за всяка категория стъпкови двигатели могат да бъдат както на официалната страница на техните производители, така и от референтната документация, която е приложена към тези продукти. Като правило стойността на грешката е в диапазона от +0,08 до -0,03 °. Просто казано, точността на позициониране се изчислява като сумата от тези два показателя: 0,08 ° + 0,03 ° = 0,11 °.
По този начин стъпковият мотор, принципът на който описваме, се отнася до оборудване с висока точност.
Както можете да си представите, от стъпковия мотортрябва да стартирате движението колкото е възможно по-скоро, след като контролния импулс е получен на контролера. Тя трябва да спре точно толкова бързо, че има висока точност на позициониране. Ако по време на движение се прекъсне последователността от контролни импулси, двигателят спира да работи в позицията, определена от последния импулс.
Също така трябва да се има предвид, че съотношението на електромагнитния момент към инерционния момент на ротора в SH трябва да бъде много по-високо от това на конвенционалните електрически мотори.
Тъй като скоростта на въртене на SD е всъщностпредставлява броя на стъпките на единица време, вместо термина "честота на въртене" в специализираната литература, често се среща определението за "стъпка". Преди да свържете мотора, е необходимо да прочетете за тези нюанси.
Тъй като в повечето стъпкови двигатели товачестотата е равна на броя на контролните импулси, не е изненадващо необичайно нейното обозначаване в техническите справочници. По-точно, за такива двигатели единицата за измерване често е херц (Hz).

n = 60f / S, където n е скоростта на въртене, изразена в обороти в минута; f - скорост на стъпката; S е броят на стъпките.
Между другото, как да се определи необходимите кондензатори за електродвигатели? Това е много просто! Достатъчно е просто да използвате тази формула:
С = 66 · Рном
Лесно е да се предположи, че при Rnom е номиналната мощност на електрическия мотор в kW.
И сега ще разгледаме най-простата връзка на стъпков двигател, използвайки модел EM-178 като пример, който се използва широко в индустриалните принтери.
Фаза 0 | Бял контролер |
Фаза 1 | оранжев |
Фаза 2 | Стъпковият мотор е свързан към червения контролер |
Фаза 3 | Свързан със синия конектор |
Общо захранване "+" | Кафяв контролер |
Не е възможно просто да запишете работата по-просто, защото има милиони много разнообразни модели, чиито характеристики имат значителни различия.
Понастоящем се използват различни видове електродвигатели с този дизайн. В тази статия ще обсъждаме най-често срещаните.
Това разнообразие от устройства е навсякъдесе използва за този ден. Всъщност това е почти стандартен трифазен двигател, на статор, който има шест зъба. Просто казано, всеки два вилки, които се противопоставят една на друга, принадлежат към една и съща фаза. Използва се серийно или паралелно свързване на техните бобини.
Що се отнася до ротора, той се намира на негосамо четири зъби. Най-често производителите на статори и ротори произвеждат магнитен мек материал, но често е възможно да се срещат само масивни ротори, изработени от обикновени метали. Въпросът е, че има само едно важно изискване за веществата, които влизат в производството им: те трябва да осигурят най-добра проводимост на магнитното поле. Това е изключително важно, ако обсъдим стъпковия двигател: принципът на работа е пряко свързан със силата на магнитното поле.
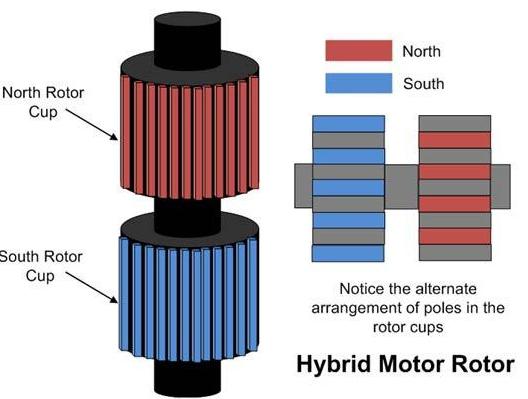
Роторът е магнитцилиндрична форма, статорът има и четири зъба с отделна намотка. За да се намали по-силно ъгълът на стъпване, при тези модели на стъпкови двигатели е необходимо да се увеличи както броят на полюсите на ротора, така и броят на зъбите на статора. Трябва обаче да се помни, че и двата параметъра имат доста строги физически ограничения. В последния параграф на нашата статия има информация за техния алтернативен дизайн (биполярен стъпков двигател), но такива модели не могат да бъдат намерени толкова често.
Както вече казахме, стъпките с устройствапостоянните магнити спират в строго фиксирана позиция дори в случаите, когато напрежението се отстранява от намотките. В този случай се задейства същия заключващ механизъм, който споменахме по-горе, позицията на фиксиране.
Използването на постоянни магнити е оправданомного гледни точки, но в същото време прилагането им може веднага да доведе до няколко проблема. Първо, цената им далеч не е достъпна. Между другото, колко е такъв стъпков двигател? Цената на моделите с постоянни магнити надхвърля 100 000 рубли.
На второ място, максималната плътност на магнитното полеможе да не е твърде висока, тъй като тази стойност е ограничена от магнетизацията на самия носител. По този начин сравнително евтините постоянни феритни магнити не позволяват получаването на повече или по-малко достатъчна сила на полето. И какви са другите видове електродвигатели, работещи по този принцип?
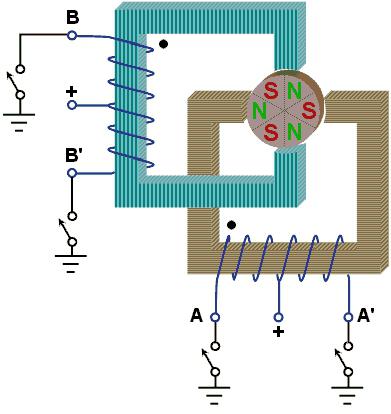
Роторът има почти същата конструкция като роторапри джет SHD, но тук намотките се правят по малко друга схема. Фактът е, че при всяка полюсова намотка има само една бобина (трифазна SD). Не е трудно да се предположи, че две бобини вече са навити в четирифазни модели. Намотката се извършва в съответствие с схемата bifilar. Особеността е, че по време на възбуждане на намотките се създава магнитно поле с различни поляризации (биполярен стъпков двигател).
</ p>>